2022
Geist, A. R., Fiene, J., Tashiro, N., Jia, Z., Trimpe, S.
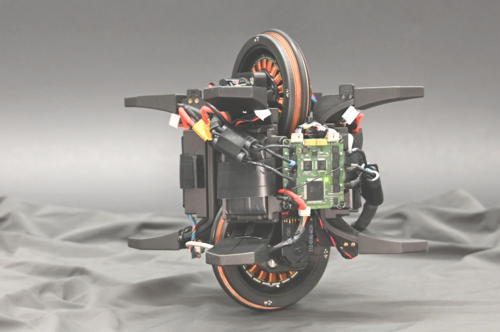
The Wheelbot: A Jumping Reaction Wheel Unicycle
IEEE Robotics and Automation Letters, 7(4):9683-9690, IEEE, 2022 (article)

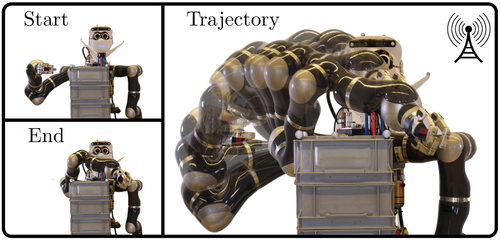
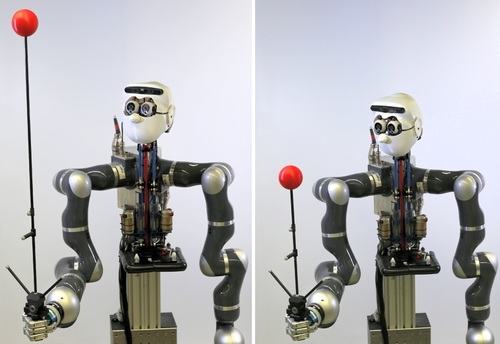
Bleher, S., Heim, S., Trimpe, S.
Learning Fast and Precise Pixel-to-Torque Control: A Platform for Reproducible Research of Learning on Hardware
IEEE Robotics & Automation Magazine, 29(2):75-84 , June 2022 (article)
2021
Demir, S. O., Culha, U., Karacakol, A. C., Pena-Francesch, A., Trimpe, S., Sitti, M.
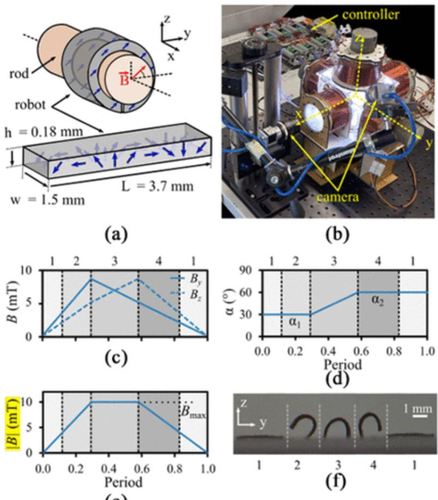
Task space adaptation via the learning of gait controllers of magnetic soft millirobots
The International Journal of Robotics Research, 40(12-14):1331-1351, December 2021 (article)
Doerr, A.
Models for Data-Efficient Reinforcement Learning on Real-World Applications
University of Stuttgart, Stuttgart, October 2021 (phdthesis)
Geist, A. R., Trimpe, S.
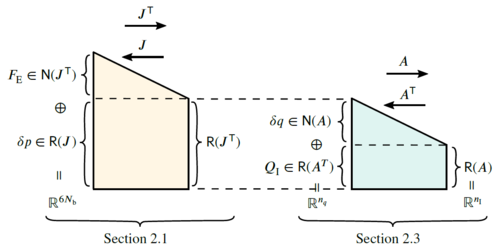
Structured learning of rigid-body dynamics: A survey and unified view from a robotics perspective
GAMM-Mitteilungen, 44(2):e202100009, Special Issue: Scientific Machine Learning, 2021 (article)
Marco, A., Baumann, D., Khadiv, M., Hennig, P., Righetti, L., Trimpe, S.
Robot Learning with Crash Constraints
IEEE Robotics and Automation Letters, 6(2):1439-1446, IEEE, February 2021 (article)
Buisson-Fenet, M., Morgenthaler, V., Trimpe, S., Di Meglio, F.
Joint State and Dynamics Estimation With High-Gain Observers and Gaussian Process Models
IEEE Control Systems Letters, 5(5):1627-1632, 2021 (article)
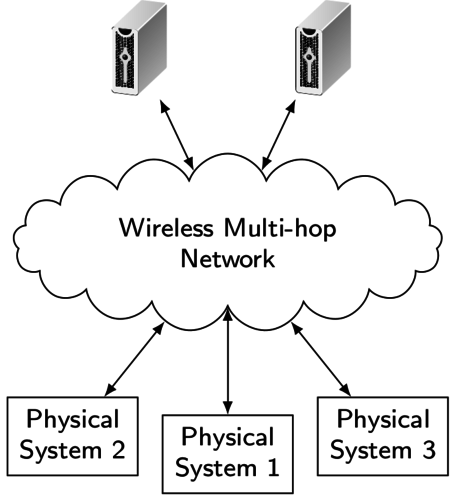
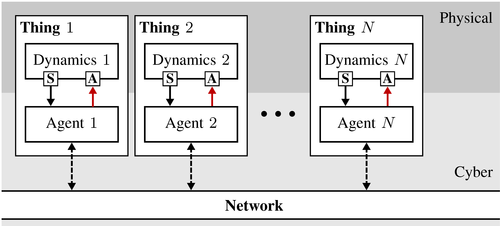
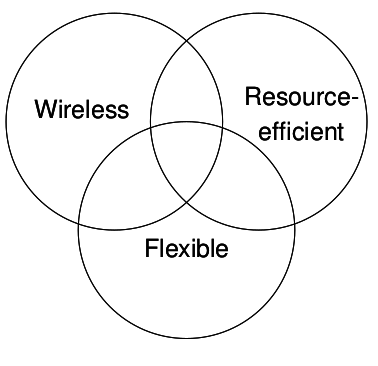
Baumann, D., Mager, F., Wetzker, U., Thiele, L., Zimmerling, M., Trimpe, S.
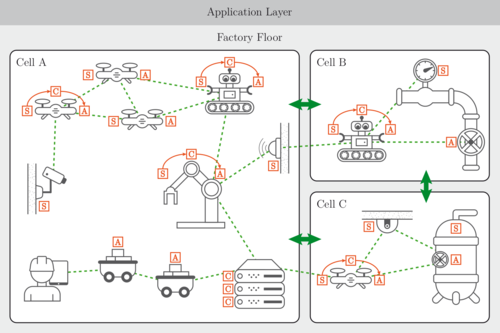
Wireless Control for Smart Manufacturing: Recent Approaches and Open Challenges
Proceedings of the IEEE, 109(4):441-467, 2021 (article)
Funk, N., Baumann, D., Berenz, V., Trimpe, S.
Learning Event-triggered Control from Data through Joint Optimization
IFAC Journal of Systems and Control, 16, pages: 100144, 2021 (article)
Schlüter, H., Solowjow, F., Trimpe, S.
Event-triggered Learning for Linear Quadratic Control
IEEE Transactions on Automatic Control, 66(10):4485-4498, 2021 (article)
Holicki, T., Scherer, C. W., Trimpe, J. S.
Controller Design via Experimental Exploration With Robustness Guarantees
IEEE Control Systems Letters, 5(2):641-646, 2021 (article)
2020
Baumann, D.
Learning and Control Strategies for Cyber-physical Systems: From Wireless Control over Deep Reinforcement Learning to Causal Identification
KTH Royal Institute of Technology, Stockholm, Sweden, December 2020 (phdthesis)
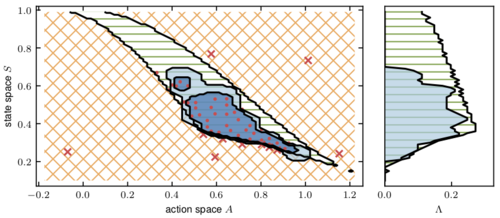
Heim, S., Rohr, A. V., Trimpe, S., Badri-Spröwitz, A.
A Learnable Safety Measure
Proceedings of the Conference on Robot Learning, 100, pages: 627-639, Proceedings of Machine Learning Research, (Editors: Kaelbling, Leslie Pack and Kragic, Danica and Sugiura, Komei), PMLR, Conference on Robot Learning, October 2020 (article)
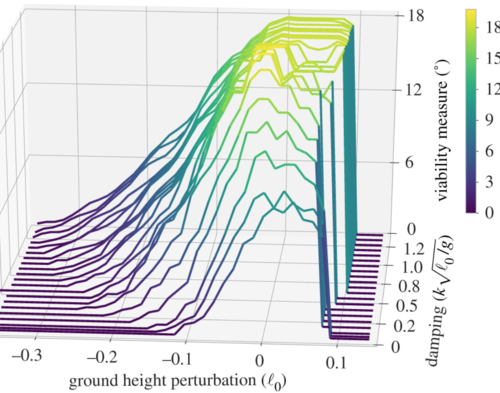
Heim, S., Millard, M., Le Mouel, C., Badri-Spröwitz, A.
A little damping goes a long way: a simulation study of how damping influences task-level stability in running
Biology Letters, 16(9):20200467, September 2020 (article)
Marco-Valle, A.
Bayesian Optimization in Robot Learning - Automatic Controller Tuning and Sample-Efficient Methods
Eberhard Karls Universität Tübingen, Tübingen, July 2020 (phdthesis)
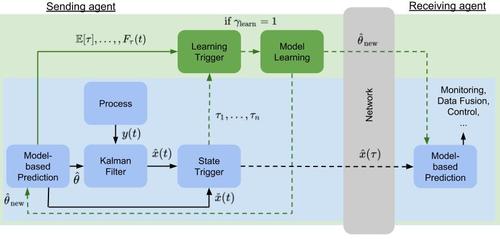
Solowjow, F., Trimpe, S.
Event-triggered Learning
Automatica, 117, pages: 109009, Elsevier, July 2020 (article)
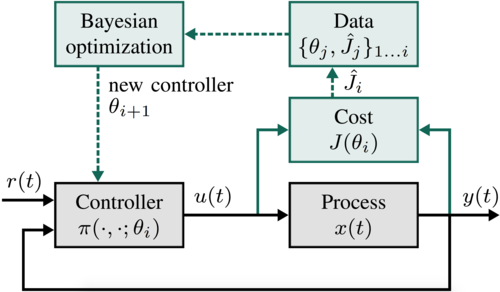
Neumann-Brosig, M., Marco, A., Schwarzmann, D., Trimpe, S.
Data-efficient Autotuning with Bayesian Optimization: An Industrial Control Study
IEEE Transactions on Control Systems Technology, 28(3):730-740, May 2020 (article)
Lima, G. S., Trimpe, S., Bessa, W. M.
Sliding Mode Control with Gaussian Process Regression for Underwater Robots
Journal of Intelligent & Robotic Systems, 99(3-4):487-498, January 2020 (article)
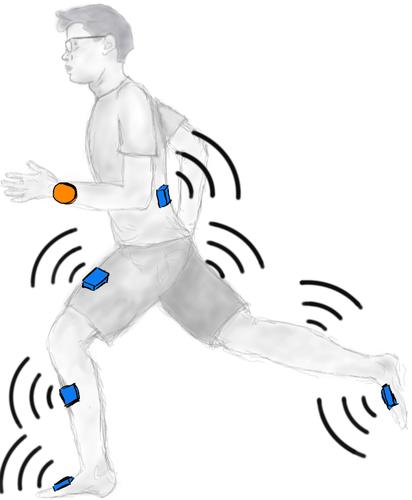
Beuchert, J., Solowjow, F., Raisch, J., Trimpe, S., Seel, T.
Hierarchical Event-triggered Learning for Cyclically Excited Systems with Application to Wireless Sensor Networks
IEEE Control Systems Letters, 4(1):103-108, January 2020 (article)
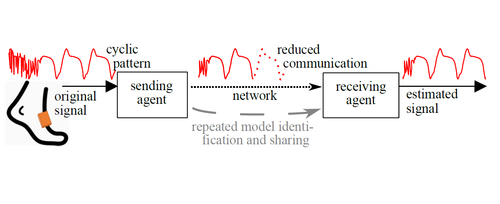
Beuchert, J., Solowjow, F., Trimpe, S., Seel, T.
Overcoming Bandwidth Limitations in Wireless Sensor Networks by Exploitation of Cyclic Signal Patterns: An Event-triggered Learning Approach
Sensors, 20(1):260, January 2020 (article)
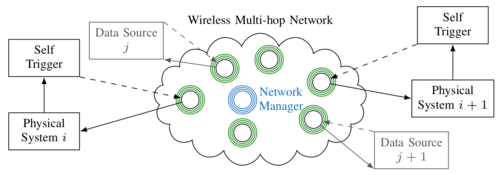
Baumann, D., Mager, F., Zimmerling, M., Trimpe, S.
Control-guided Communication: Efficient Resource Arbitration and Allocation in Multi-hop Wireless Control Systems
IEEE Control Systems Letters, 4(1):127-132, January 2020 (article)
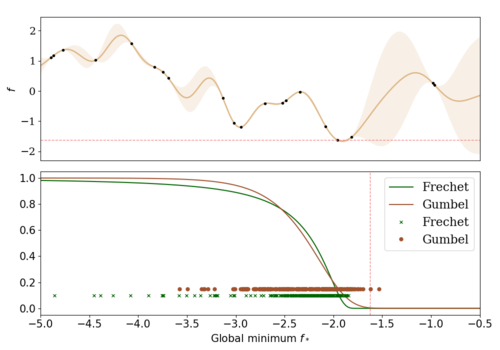
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
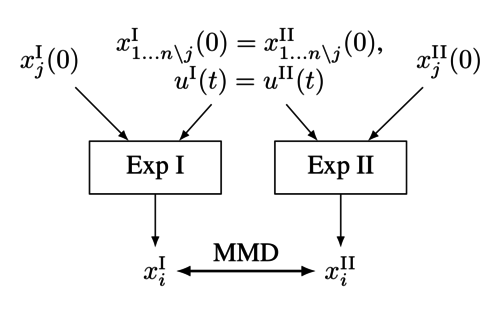
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
Schwenkel, L., Gharbi, M., Trimpe, S., Ebenbauer, C.
Online learning with stability guarantees: A memory-based warm starting for real-time MPC
Automatica, 122, pages: 109247, 2020 (article)
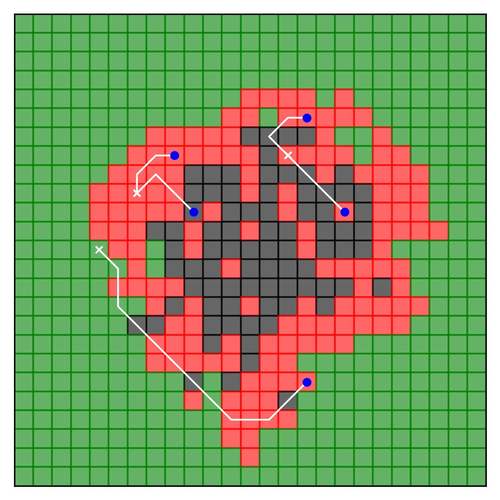
Haksar, R. N., Trimpe, S., Schwager, M.
Spatial Scheduling of Informative Meetings for Multi-Agent Persistent Coverage
IEEE Robotics and Automation Letters, 5(2):3027-3034, 2020 (article)
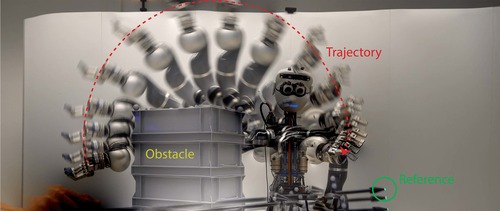
Nubert, J., Koehler, J., Berenz, V., Allgower, F., Trimpe, S.
Safe and Fast Tracking on a Robot Manipulator: Robust MPC and Neural Network Control
IEEE Robotics and Automation Letters, 5(2):3050-3057, 2020 (article)
2019
Baumann, D., Mager, F., Jacob, R., Thiele, L., Zimmerling, M., Trimpe, S.
Fast Feedback Control over Multi-hop Wireless Networks with Mode Changes and Stability Guarantees
ACM Transactions on Cyber-Physical Systems, 4(2):18, November 2019 (article)
Trimpe, S., Baumann, D.
Resource-aware IoT Control: Saving Communication through Predictive Triggering
IEEE Internet of Things Journal, 6(3):5013-5028, June 2019 (article)
Baumann, D.
Fast and Resource-Efficient Control of Wireless Cyber-Physical Systems
KTH Royal Institute of Technology, Stockholm, February 2019 (phdthesis)
Duecker, D. A., Geist, A. R., Kreuzer, E., Solowjow, E.
Learning Environmental Field Exploration with Computationally Constrained Underwater Robots: Gaussian Processes Meet Stochastic Optimal Control
Sensors, 19, 2019 (article)
2018
Hertneck, M., Koehler, J., Trimpe, S., Allgöwer, F.
Learning an Approximate Model Predictive Controller with Guarantees
IEEE Control Systems Letters, 2(3):543-548, July 2018 (article)
Muehlebach, M., Trimpe, S.
Distributed Event-Based State Estimation for Networked Systems: An LMI Approach
IEEE Transactions on Automatic Control, 63(1):269-276, January 2018 (article)
2017
Trimpe, S.
Event-based State Estimation: An Emulation-based Approach
IET Control Theory & Applications, 11(11):1684-1693, July 2017 (article)
2016
Wüthrich, M., Trimpe, S., Garcia Cifuentes, C., Kappler, D., Schaal, S.
A New Perspective and Extension of the Gaussian Filter
The International Journal of Robotics Research, 35(14):1731-1749, December 2016 (article)
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
Laidig, D., Trimpe, S., Seel, T.
Event-based Sampling for Reducing Communication Load in Realtime Human Motion Analysis by Wireless Inertial Sensor Networks
Current Directions in Biomedical Engineering, 2(1):711-714, De Gruyter, 2016 (article)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
2014
Trimpe, S.
Wenn es was zu sagen gibt
Bild der Wissenschaft, pages: 20-23, November 2014, (popular science article in German) (article)
Trimpe, S., D’Andrea, R.
A Limiting Property of the Matrix Exponential
IEEE Transactions on Automatic Control, 59(4):1105-1110, 2014 (article)
Trimpe, S., D’Andrea, R.
Event-Based State Estimation With Variance-Based Triggering
IEEE Transactions on Automatic Control, 59(12):3266-3281, 2014 (article)
2013
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)
2012
Trimpe, S., D’Andrea, R.
The Balancing Cube: A Dynamic Sculpture as Test Bed for Distributed Estimation and Control
IEEE Control Systems Magazine, 32(6):48-75, December 2012 (article)