2021
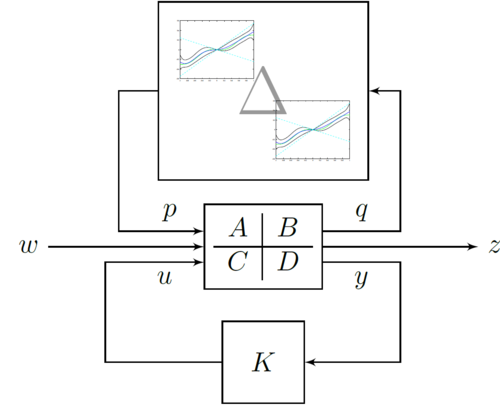
Fiedler, C., Scherer, C. W., Trimpe, S.
Learning-enhanced robust controller synthesis with rigorous statistical and control-theoretic guarantees
In 60th IEEE Conference on Decision and Control (CDC), IEEE, December 2021 (inproceedings) Accepted

Müller, S., von Rohr, A., Trimpe, S.
Local policy search with Bayesian optimization
In Advances in Neural Information Processing Systems 34, 25, pages: 20708-20720, (Editors: Ranzato, M. and Beygelzimer, A. and Dauphin, Y. and Liang, P. S. and Wortman Vaughan, J.), Curran Associates, Inc., Red Hook, NY, 35th Conference on Neural Information Processing Systems (NeurIPS 2021) , December 2021 (inproceedings)
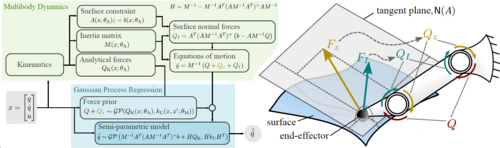
Rath, L., Geist, A. R., Trimpe, S.
Using Physics Knowledge for Learning Rigid-Body Forward Dynamics with Gaussian Process Force Priors
In Proceedings of the 5th Conference on Robot Learning, 164, pages: 101-111, Proceedings of Machine Learning Research, (Editors: Faust, Aleksandra and Hsu, David and Neumann, Gerhard), PMLR, 5th Conference on Robot Learning (CoRL 2021), November 2021 (inproceedings)
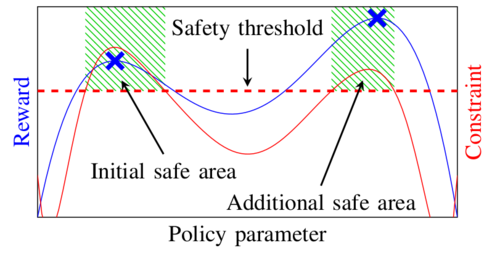
Baumann, D., Marco, A., Turchetta, M., Trimpe, S.
GoSafe: Globally Optimal Safe Robot Learning
In 2021 IEEE International Conference on Robotics and Automation (ICRA 2021), pages: 4452-4458, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2021), October 2021 (inproceedings)
von Rohr, A., Neumann-Brosig, M., Trimpe, S.
Probabilistic robust linear quadratic regulators with Gaussian processes
Proceedings of the 3rd Conference on Learning for Dynamics and Control, pages: 324-335, Proceedings of Machine Learning Research (PMLR), Vol. 144, (Editors: Jadbabaie, Ali and Lygeros, John and Pappas, George J. and Parrilo, Pablo A. and Recht, Benjamin and Tomlin, Claire J. and Zeilinger, Melanie N.), PMLR, Brookline, MA 02446 , 3rd Annual Conference on Learning for Dynamics and Control (L4DC), June 2021 (conference)
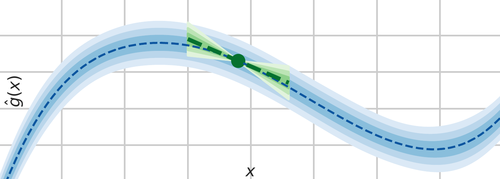
Massiani, P., Heim, S., Trimpe, S.
On exploration requirements for learning safety constraints
In Proceedings of the 3rd Conference on Learning for Dynamics and Control, pages: 905-916, Proceedings of Machine Learning Research (PMLR), Vol. 144, (Editors: Jadbabaie, Ali and Lygeros, John and Pappas, George J. and Parrilo, Pablo A. and Recht, Benjamin and Tomlin, Claire J. and Zeilinger, Melanie), PMLR, 3rd Annual Conference on Learning for Dynamics and Control (L4DC), June 2021 (inproceedings)
Fiedler, C., Scherer, C. W., Trimpe, S.
Practical and Rigorous Uncertainty Bounds for Gaussian Process Regression
In The Thirty-Fifth AAAI Conference on Artificial Intelligence, the Thirty-Third Conference on Innovative Applications of Artificial Intelligence, the Eleventh Symposium on Educational Advances in Artificial Intelligence, 8, pages: 7439-7447, AAAI Press, Palo Alto, CA, Thirty-Fifth AAAI Conference on Artificial Intelligence (AAAI 2021), Thirty-Third Conference on Innovative Applications of Artificial Intelligence (IAAI 2021), Eleventh Symposium on Educational Advances in Artificial Intelligence (EAAI 2021), May 2021 (inproceedings)
Heim, S., Millard, M., Mouel, C. L., Badri-Spröwitz, A.
A little damping goes a long way
In Integrative and Comparative Biology, 61(Supplement 1):E367-E367, Oxford University Press, Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2021) , March 2021 (inproceedings)
2020
Culha, U., Demir, S. O., Trimpe, S., Sitti, M.
Learning of sub-optimal gait controllers for magnetic walking soft millirobots
In Robotics: Science and Systems XVI, pages: P070, (Editors: Toussaint, Marc and Bicchi, Antonio and Hermans, Tucker), RSS Foundation, Robotics: Science and Systems 2020 (RSS 2020), 2020 (inproceedings)
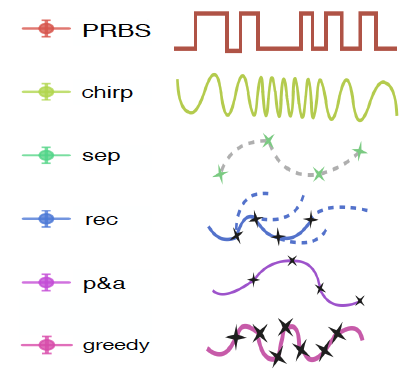
Buisson-Fenet, M., Solowjow, F., Trimpe, S.
Actively Learning Gaussian Process Dynamics
Proceedings of the 2nd Conference on Learning for Dynamics and Control, 120, pages: 5-15, Proceedings of Machine Learning Research (PMLR), (Editors: Bayen, Alexandre M. and Jadbabaie, Ali and Pappas, George and Parrilo, Pablo A. and Recht, Benjamin and Tomlin, Claire and Zeilinger, Melanie), PMLR, 2nd Annual Conference on Learning for Dynamics and Control (L4DC), June 2020 (conference)
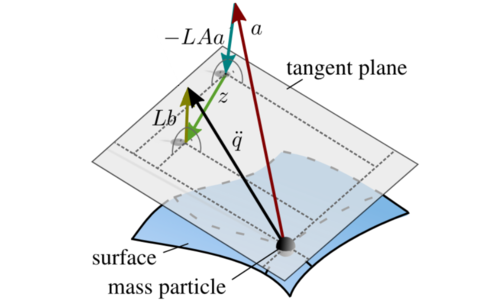
Geist, A. R., Trimpe, S.
Learning Constrained Dynamics with Gauss Principle adhering Gaussian Processes
In Proceedings of the 2nd Conference on Learning for Dynamics and Control, 120, pages: 225-234, Proceedings of Machine Learning Research (PMLR), (Editors: Bayen, Alexandre M. and Jadbabaie, Ali and Pappas, George and Parrilo, Pablo A. and Recht, Benjamin and Tomlin, Claire and Zeilinger, Melanie), PMLR, 2nd Annual Conference on Learning for Dynamics and Control (L4DC), June 2020 (inproceedings)
Turchetta, M., Krause, A., Trimpe, S.
Robust Model-free Reinforcement Learning with Multi-objective Bayesian Optimization
In 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 10702-10708, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020), May 2020 (inproceedings)
2019
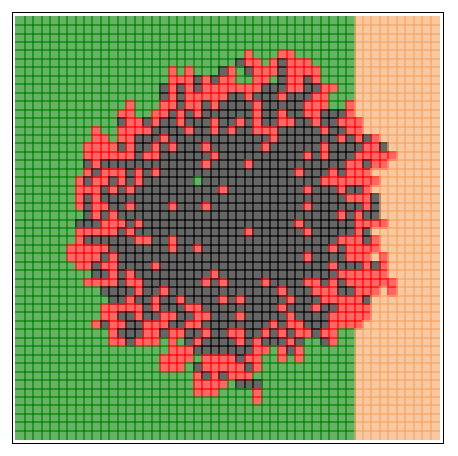
Haksar, R., Solowjow, F., Trimpe, S., Schwager, M.
Controlling Heterogeneous Stochastic Growth Processes on Lattices with Limited Resources
In Proceedings of the 58th IEEE International Conference on Decision and Control (CDC) , pages: 1315-1322, 58th IEEE International Conference on Decision and Control (CDC), December 2019 (conference)
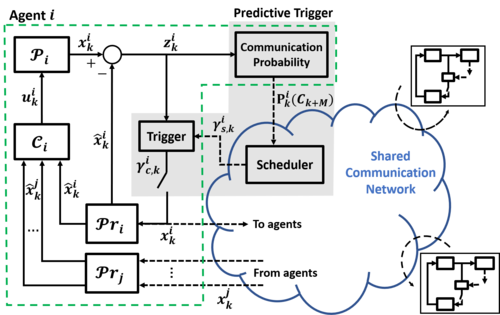
Mastrangelo, J. M., Baumann, D., Trimpe, S.
Predictive Triggering for Distributed Control of Resource Constrained Multi-agent Systems
In Proceedings of the 8th IFAC Workshop on Distributed Estimation and Control in Networked Systems, pages: 79-84, 8th IFAC Workshop on Distributed Estimation and Control in Networked Systems (NecSys), September 2019 (inproceedings)
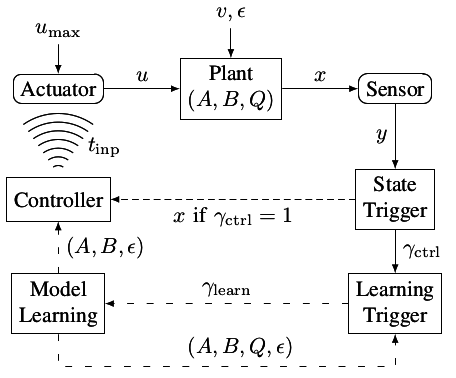
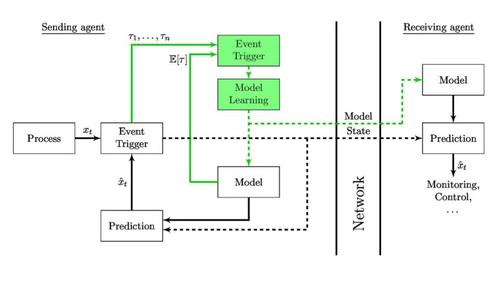
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
Event-triggered Pulse Control with Model Learning (if Necessary)
In Proceedings of the American Control Conference, pages: 792-797, American Control Conference (ACC), July 2019 (inproceedings)
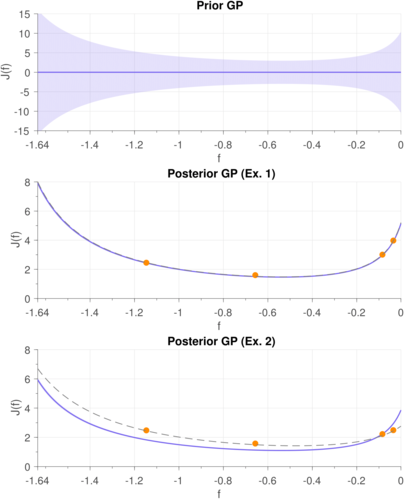
Romer, A., Trimpe, S., Allgöwer, F.
Data-driven inference of passivity properties via Gaussian process optimization
In Proceedings of the European Control Conference, European Control Conference (ECC), June 2019 (inproceedings)
Doerr, A., Volpp, M., Toussaint, M., Trimpe, S., Daniel, C.
Trajectory-Based Off-Policy Deep Reinforcement Learning
In Proceedings of the International Conference on Machine Learning (ICML), International Conference on Machine Learning (ICML), June 2019 (inproceedings)
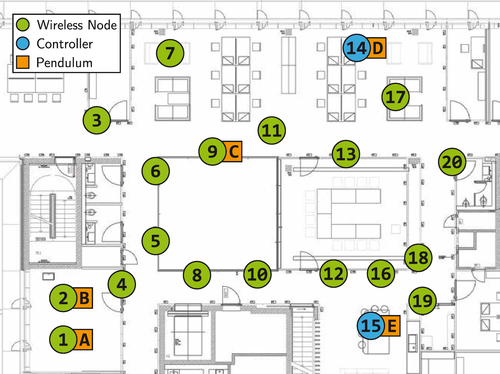
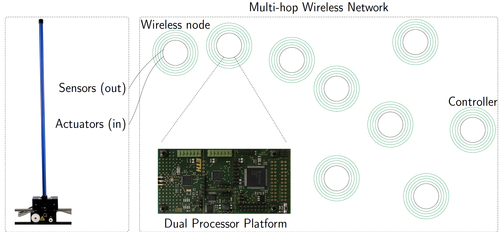
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
Feedback Control Goes Wireless: Guaranteed Stability over Low-power Multi-hop Networks
In Proceedings of the 10th ACM/IEEE International Conference on Cyber-Physical Systems, pages: 97-108, 10th ACM/IEEE International Conference on Cyber-Physical Systems, April 2019 (inproceedings)
2018
Baumann, D., Zhu, J., Martius, G., Trimpe, S.
Deep Reinforcement Learning for Event-Triggered Control
In Proceedings of the 57th IEEE International Conference on Decision and Control (CDC), pages: 943-950, 57th IEEE International Conference on Decision and Control (CDC), December 2018 (inproceedings)
Reeb, D., Doerr, A., Gerwinn, S., Rakitsch, B.
Learning Gaussian Processes by Minimizing PAC-Bayesian Generalization Bounds
In Proceedings Neural Information Processing Systems, Neural Information Processing Systems (NIPS) , December 2018 (inproceedings)
Solowjow, F., Mehrjou, A., Schölkopf, B., Trimpe, S.
Efficient Encoding of Dynamical Systems through Local Approximations
In Proceedings of the 57th IEEE International Conference on Decision and Control (CDC), pages: 6073 - 6079 , Miami, Fl, USA, December 2018 (inproceedings)
Lima, G. S., Bessa, W. M., Trimpe, S.
Depth Control of Underwater Robots using Sliding Modes and Gaussian Process Regression
In Proceeding of the 15th Latin American Robotics Symposium, João Pessoa, Brazil, 15th Latin American Robotics Symposium, November 2018 (inproceedings)
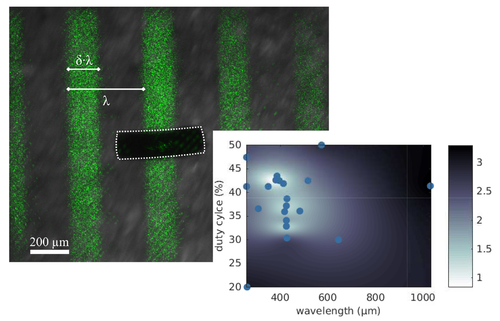
Rohr, A. V., Trimpe, S., Marco, A., Fischer, P., Palagi, S.
Gait learning for soft microrobots controlled by light fields
In International Conference on Intelligent Robots and Systems (IROS) 2018, pages: 6199-6206, Piscataway, NJ, USA, International Conference on Intelligent Robots and Systems 2018, October 2018 (inproceedings)
Soloperto, R., Müller, M. A., Trimpe, S., Allgöwer, F.
Learning-Based Robust Model Predictive Control with State-Dependent Uncertainty
In Proceedings of the IFAC Conference on Nonlinear Model Predictive Control (NMPC), Madison, Wisconsin, USA, 6th IFAC Conference on Nonlinear Model Predictive Control, August 2018 (inproceedings)
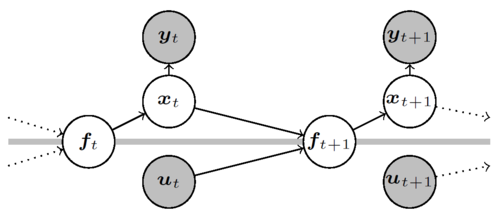
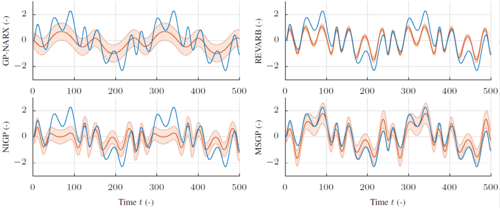
Doerr, A., Daniel, C., Schiegg, M., Nguyen-Tuong, D., Schaal, S., Toussaint, M., Trimpe, S.
Probabilistic Recurrent State-Space Models
In Proceedings of the International Conference on Machine Learning (ICML), International Conference on Machine Learning (ICML), July 2018 (inproceedings)
Solowjow, F., Baumann, D., Garcke, J., Trimpe, S.
Event-triggered Learning for Resource-efficient Networked Control
In Proceedings of the American Control Conference (ACC), pages: 6506 - 6512, American Control Conference, June 2018 (inproceedings)
Baumann, D., Mager, F., Singh, H., Zimmerling, M., Trimpe, S.
Evaluating Low-Power Wireless Cyber-Physical Systems
In Proceedings of the IEEE Workshop on Benchmarking Cyber-Physical Networks and Systems (CPSBench), pages: 13-18, IEEE Workshop on Benchmarking Cyber-Physical Networks and Systems (CPSBench), April 2018 (inproceedings)
2017
Marco, A., Hennig, P., Schaal, S., Trimpe, S.
On the Design of LQR Kernels for Efficient Controller Learning
Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC), pages: 5193-5200, IEEE, IEEE Conference on Decision and Control, December 2017 (conference)
Doerr, A., Daniel, C., Nguyen-Tuong, D., Marco, A., Schaal, S., Toussaint, M., Trimpe, S.
Optimizing Long-term Predictions for Model-based Policy Search
Proceedings of 1st Annual Conference on Robot Learning (CoRL), 78, pages: 227-238, (Editors: Sergey Levine and Vincent Vanhoucke and Ken Goldberg), 1st Annual Conference on Robot Learning, November 2017 (conference)
Doerr, A., Nguyen-Tuong, D., Marco, A., Schaal, S., Trimpe, S.
Model-Based Policy Search for Automatic Tuning of Multivariate PID Controllers
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 5295-5301, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
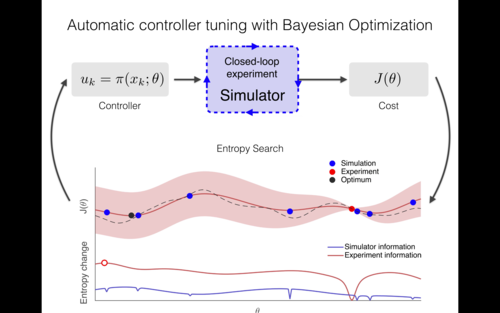
Marco, A., Berkenkamp, F., Hennig, P., Schoellig, A. P., Krause, A., Schaal, S., Trimpe, S.
Virtual vs. Real: Trading Off Simulations and Physical Experiments in Reinforcement Learning with Bayesian Optimization
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 1557-1563, IEEE, Piscataway, NJ, USA, May 2017 (inproceedings)
2016
Trimpe, S.
Predictive and Self Triggering for Event-based State Estimation
In Proceedings of the 55th IEEE Conference on Decision and Control (CDC), pages: 3098-3105, Las Vegas, NV, USA, December 2016 (inproceedings)
Wüthrich, M., Garcia Cifuentes, C., Trimpe, S., Meier, F., Bohg, J., Issac, J., Schaal, S.
Robust Gaussian Filtering using a Pseudo Measurement
In Proceedings of the American Control Conference (ACC), Boston, MA, USA, July 2016 (inproceedings)
Marco, A., Hennig, P., Bohg, J., Schaal, S., Trimpe, S.
Automatic LQR Tuning Based on Gaussian Process Global Optimization
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 270-277, IEEE, IEEE International Conference on Robotics and Automation, May 2016 (inproceedings)
Issac, J., Wüthrich, M., Garcia Cifuentes, C., Bohg, J., Trimpe, S., Schaal, S.
Depth-based Object Tracking Using a Robust Gaussian Filter
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2016, IEEE, IEEE International Conference on Robotics and Automation, May 2016 (inproceedings)
Ebner, S., Trimpe, S.
Communication Rate Analysis for Event-based State Estimation
In Proceedings of the 13th International Workshop on Discrete Event Systems, May 2016 (inproceedings)
2015
Marco, A., Hennig, P., Bohg, J., Schaal, S., Trimpe, S.
Automatic LQR Tuning Based on Gaussian Process Optimization: Early Experimental Results
Machine Learning in Planning and Control of Robot Motion Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (iROS), pages: , , Machine Learning in Planning and Control of Robot Motion Workshop, October 2015 (conference)
Doerr, A., Ratliff, N., Bohg, J., Toussaint, M., Schaal, S.
Direct Loss Minimization Inverse Optimal Control
In Proceedings of Robotics: Science and Systems, Rome, Italy, Robotics: Science and Systems XI, July 2015 (inproceedings)
Muehlebach, M., Trimpe, S.
LMI-Based Synthesis for Distributed Event-Based State Estimation
In Proceedings of the American Control Conference, July 2015 (inproceedings)
Muehlebach, M., Trimpe, S.
Guaranteed H2 Performance in Distributed Event-Based State Estimation
In Proceeding of the First International Conference on Event-based Control, Communication, and Signal Processing, June 2015 (inproceedings)
Trimpe, S., Campi, M.
On the Choice of the Event Trigger in Event-based Estimation
In Proceeding of the First International Conference on Event-based Control, Communication, and Signal Processing, June 2015 (inproceedings)
Trimpe, S., Buchli, J.
Event-based Estimation and Control for Remote Robot Operation with Reduced Communication
In Proceedings of the IEEE International Conference on Robotics and Automation, May 2015 (inproceedings)
Wüthrich, M., Trimpe, S., Kappler, D., Schaal, S.
A New Perspective and Extension of the Gaussian Filter
In Robotics: Science and Systems, 2015 (inproceedings)
2014
Trimpe, S., Millane, A., Doessegger, S., D’Andrea, R.
A Self-Tuning LQR Approach Demonstrated on an Inverted Pendulum
In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 2014 (inproceedings)
Trimpe, S.
Stability Analysis of Distributed Event-Based State Estimation
In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, 2014 (inproceedings)
2012
Trimpe, S.
Event-based State Estimation with Switching Static-gain Observers
In Proceedings of the 3rd IFAC Workshop on Distributed Estimation and Control in Networked Systems, 2012 (inproceedings)
Trimpe, S., D’Andrea, R.
Event-based State Estimation with Variance-Based Triggering
In Proceedings of the 51st IEEE Conference on Decision and Control, 2012 (inproceedings)
2011
Trimpe, S., D’Andrea, R.
An Experimental Demonstration of a Distributed and Event-based State Estimation Algorithm
In Proceedings of the 18th IFAC World Congress, 2011 (inproceedings)
Trimpe, S., D’Andrea, R.
Reduced Communication State Estimation for Control of an Unstable Networked Control System
In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, 2011 (inproceedings)
2010
Trimpe, S., D’Andrea, R.
Accelerometer-based Tilt Estimation of a Rigid Body with only Rotational Degrees of Freedom
In Proceedings of the IEEE International Conference on Robotics and Automation, 2010 (inproceedings)