
2021
Doerr, A.
Models for Data-Efficient Reinforcement Learning on Real-World Applications
University of Stuttgart, Stuttgart, October 2021 (phdthesis)
2020
Baumann, D.
Learning and Control Strategies for Cyber-physical Systems: From Wireless Control over Deep Reinforcement Learning to Causal Identification
KTH Royal Institute of Technology, Stockholm, Sweden, December 2020 (phdthesis)
Marco-Valle, A.
Bayesian Optimization in Robot Learning - Automatic Controller Tuning and Sample-Efficient Methods
Eberhard Karls Universität Tübingen, Tübingen, July 2020 (phdthesis)
Baumann, D., Solowjow, F., Johansson, K. H., Trimpe, S.
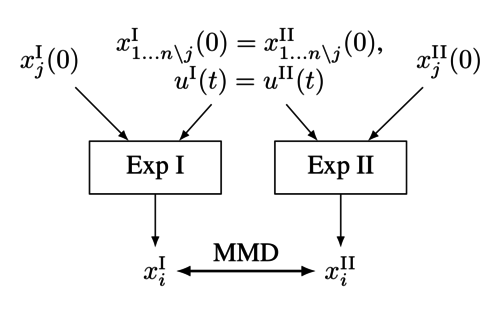
Identifying Causal Structure in Dynamical Systems
2020 (techreport)
2019
Baumann, D.
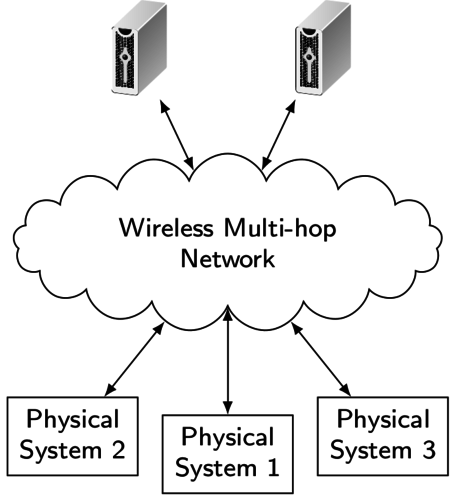
Fast and Resource-Efficient Control of Wireless Cyber-Physical Systems
KTH Royal Institute of Technology, Stockholm, February 2019 (phdthesis)
2016
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
Marco, A.
Gaussian Process Optimization for Self-Tuning Control
Polytechnic University of Catalonia (BarcelonaTech), October 2015 (mastersthesis)
Doerr, A.
Adaptive and Learning Concepts in Hydraulic Force Control
University of Stuttgart, September 2015 (mastersthesis)
Trimpe, S.
Lernende Roboter
In Jahrbuch der Max-Planck-Gesellschaft, Max Planck Society, May 2015, (popular science article in German) (inbook)
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
2013
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)