
2021
Doerr, A.
Models for Data-Efficient Reinforcement Learning on Real-World Applications
University of Stuttgart, Stuttgart, October 2021 (phdthesis)
2020
Baumann, D.
Learning and Control Strategies for Cyber-physical Systems: From Wireless Control over Deep Reinforcement Learning to Causal Identification
KTH Royal Institute of Technology, Stockholm, Sweden, December 2020 (phdthesis)
Marco-Valle, A.
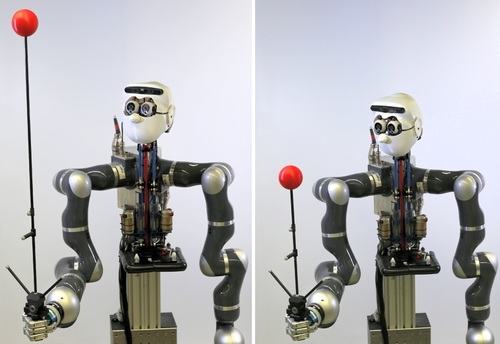
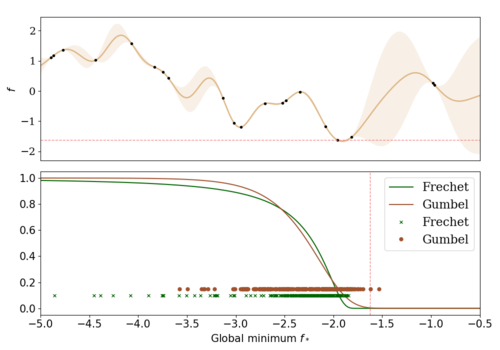
Bayesian Optimization in Robot Learning - Automatic Controller Tuning and Sample-Efficient Methods
Eberhard Karls Universität Tübingen, Tübingen, July 2020 (phdthesis)
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision
2019
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
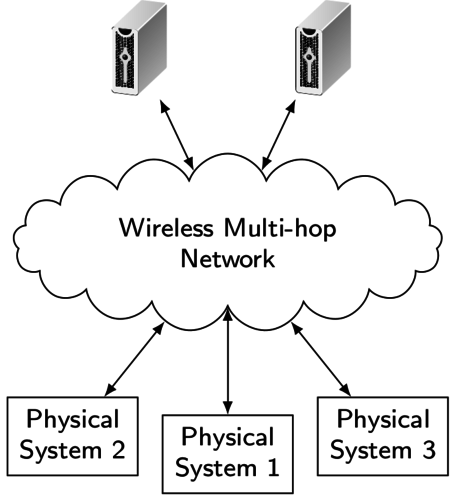
Demo Abstract: Fast Feedback Control and Coordination with Mode Changes for Wireless Cyber-Physical Systems
Proceedings of the 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 340-341, 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), April 2019 (poster)
Baumann, D.
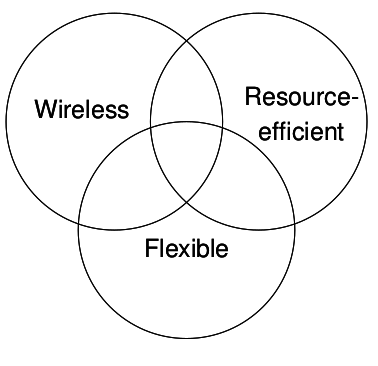
Fast and Resource-Efficient Control of Wireless Cyber-Physical Systems
KTH Royal Institute of Technology, Stockholm, February 2019 (phdthesis)
2018
Mager, F., Baumann, D., Trimpe, S., Zimmerling, M.
Poster Abstract: Toward Fast Closed-loop Control over Multi-hop Low-power Wireless Networks
Proceedings of the 17th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 158-159, Porto, Portugal, April 2018 (poster)
2015
Trimpe, S.
Lernende Roboter
In Jahrbuch der Max-Planck-Gesellschaft, Max Planck Society, May 2015, (popular science article in German) (inbook)
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
2013
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)